






-
传统的车式载体速度测量通常采用加速度计、里程计、全球卫星导航定位系统(Global Navigation Satellite System,GNSS)等手段,加速度计和里程计的误差随测量时间累积,无法满足导航定位长时间高精度速度测量的要求,而GNSS在丛林、城市高楼、山区涵洞等存在遮蔽的场景下,信号易被拒止,无法实现全天时自主速度测量的目标。
寻找一种高精度、鲁棒性强、可实现全天时多环境的速度传感手段是提高车式载体导航定位精度的迫切需求,激光多普勒测速仪(Laser Doppler velocimeter,LDV)进入了研究人员的视野,作为一种高精度的速度传感手段,在运动载体速度获取和流体场、风场速度分布探测等领域有着重要的应用价值和前景[1]。
LDV的测量光束被各种固体地面散射形成的散射信号远强于在气体和液体产生的散射信号,这对于提取速度信号无疑是极为有利的,也充分说明了LDV用于运动载体速度测量的可行性[2]。近年来,研究人员通过将LDV与捷联惯导系统(Strapdown Inertial Navigation System,SINS)结合进行组合导航实验,有效修正惯性器件误差随时间的发散,极大地提高了车式载体的定位导航精度,同时满足了全天时自主导航的要求[3-4],在民用领域可有效提高轨道车辆定位精度,降低定位成本,进一步实现轨道车辆进站无人化控制精准停车[5];为军用领域的无依托发射提供了技术支撑,有望在未来实现“随停随打、边走边打”的目标,极大地提高部队战斗力[6]。
LDV在车式载体上的成功应用展现了在导航定位领域的巨大潜力,成为当前多传感器信息融合导航技术研究中重要的传感器。随着应用场景的拓展,LDV有望在无人机、水下潜航器的测速定位以及高速列车的大速度量程测量中发挥重要的作用。文中将对用于运动载体导航定位的激光多普勒测速仪技术的研究现状进行综述。
-
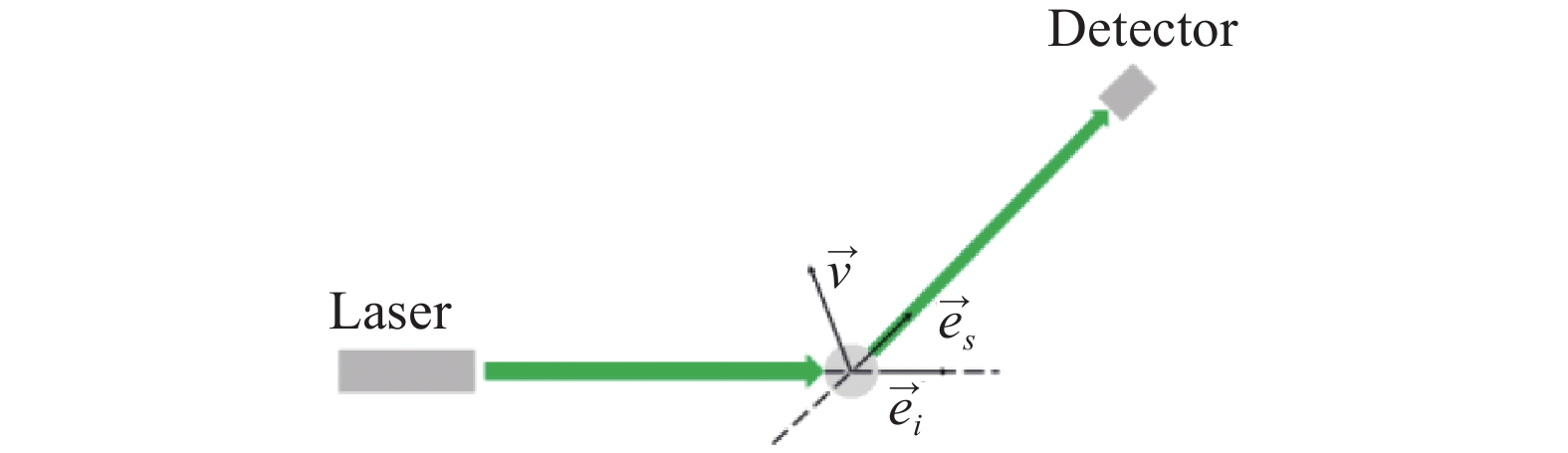
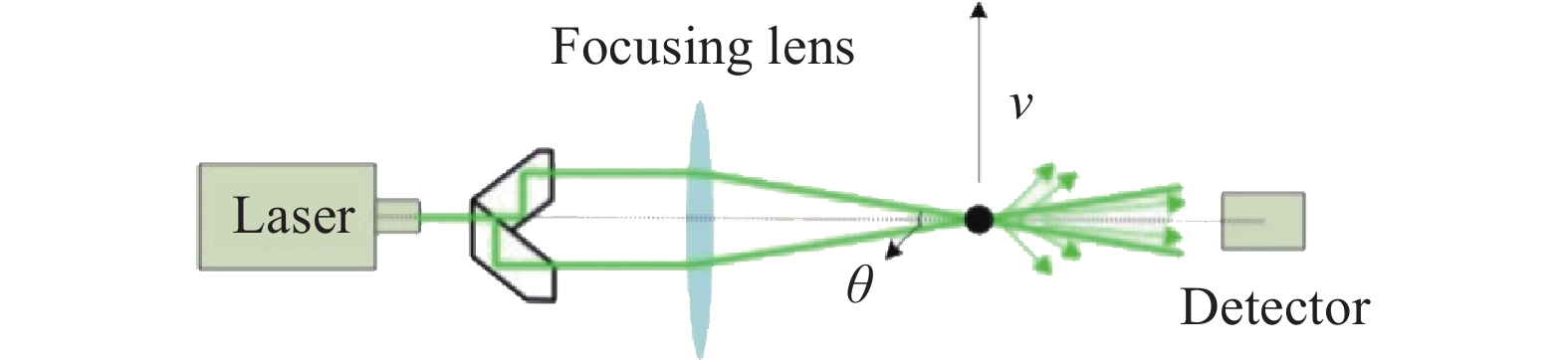
激光多普勒测速仪进行速度测量的原理可用图1来解释,该过程的多普勒频移fD可表示为:[3]:
假定光源发出激光的频率为f0,粒子的运动速度为v,图中光源、运动微粒和光电探测器三者的位置关系具有一般性,$ {\overset{\lower0.5 em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {e} _s} $为运动粒子指向探测器方向上的单位向量,$ {\overset{\lower0.5 em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {e} _i} $为激光器指向运动粒子方向上的单位向量。

Figure 1. The fundamental concept of LDV
在实际应用中,由于测速仪内部光路结构设计的不同,多普勒频移的具体表达式会略有区别。第2节将针对不同结构的LDV进一步推导其对应的多普勒频移与运动速度之间的关系式。
-
根据应用背景的不同,LDV在系统结构上存在着不同。此节将从光路结构、速度测量维度两个方面对常用于载体速度测量的LDV进行分类介绍。
-
1970年,Penny提出了双光束差动速度测量系统[7]。双光束差动结构中参与外差干涉的两束散射光都发生了多普勒频移,最后根据两束散射光的频差信息来解算速度信息。图2为典型的双光束LDV的结构,两束测量光交汇的位置称为测量控制体。
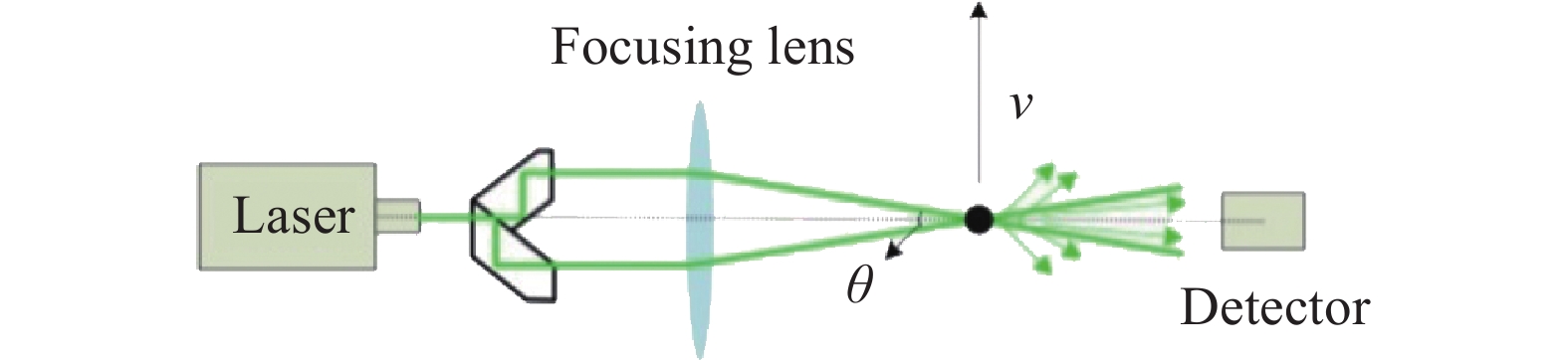
Figure 2. Structure diagram of dual-beam LDV
根据公式(1)可以得到如公式(2)所示的双光束LDV中的多普勒频移fD表达式[2],式中:λ为激光波长;θ为两束测量光束之间的夹角。根据测量原理可以看出,测得的多普勒频率与接收方向无关,所以对探测器的位置没有特殊要求,光路易调整,还可以采用大口径接收器接收散射光,从而提高信噪比。由于只有位于测量控制体内的运动粒子或运动表面的速度信息才能被探测到,说明控制体的大小决定了双光束LDV的空间的分辨率,进一步可知双光束结构的LDV空间分辨率很高。
但实际的路面总是凹凸不平的,车辆会随着路面的起伏而发生上下颠簸,将双光束LDV应用于车载自速度测量中时,其测量控制体极易脱离路面,造成速度信息丢失。
-
针对路面颠簸导致的传统双光束LDV信号丢失问题,在车载激光多普勒测速的实际应用中,研究人员提出了多点分层的思想[2],双光束差动系统的控制体决定了测速仪的灵敏度和空间分辨率,选择合适的光学参数可以控制其长度,当地面在控制体高度范围内时即可获得多普勒频率信息,若使用多个探头,将不同探头的控制体范围调整至不同高度,当车载系统在地面上行驶时,对各个探头的输出信号进行实时判断,就可以选出一组有效的多普勒信号,避免了车体颠簸时使用单探头以致信号丢失的情况,从而可以有效地进行离焦测量。图3所示为多层分点双光束LDV的结构示意图。

Figure 3. Structure diagram of multipoint layer-type dual-beam LDV
-
单光束LDV的概念是相较前文提到的双光束LDV而言的,是指系统中产生多普勒频移的只有一束测量光,另一束未发生频移的光作为参考光,这种LDV也可以称作参考光结构LDV。1964年,Yeh 和 Cummins 首次采用前向散射的单光束LDV对液体的流速测量开展了实验[8],如图4所示。

Figure 4. The experimental structure of reference [8]
激光器输出的光束由分束镜分成两束,一束测量光经流体中的悬浮粒子散射后的部分散射光与另一束本振光在探测器表面干涉形成外差拍频信号,经过信号处理即可得到多普勒频移信息。实验中测得的0.05 cm/s以下的速度信息与理论值吻合度很高,说明激光多普勒测速技术相较于传统的流速测量方法具有更高的精度和更宽的测量范围,同时也证实了多普勒测速技术可以用作实现非接触式速度测量。自此,激光多普勒测速技术正式走向了历史舞台。
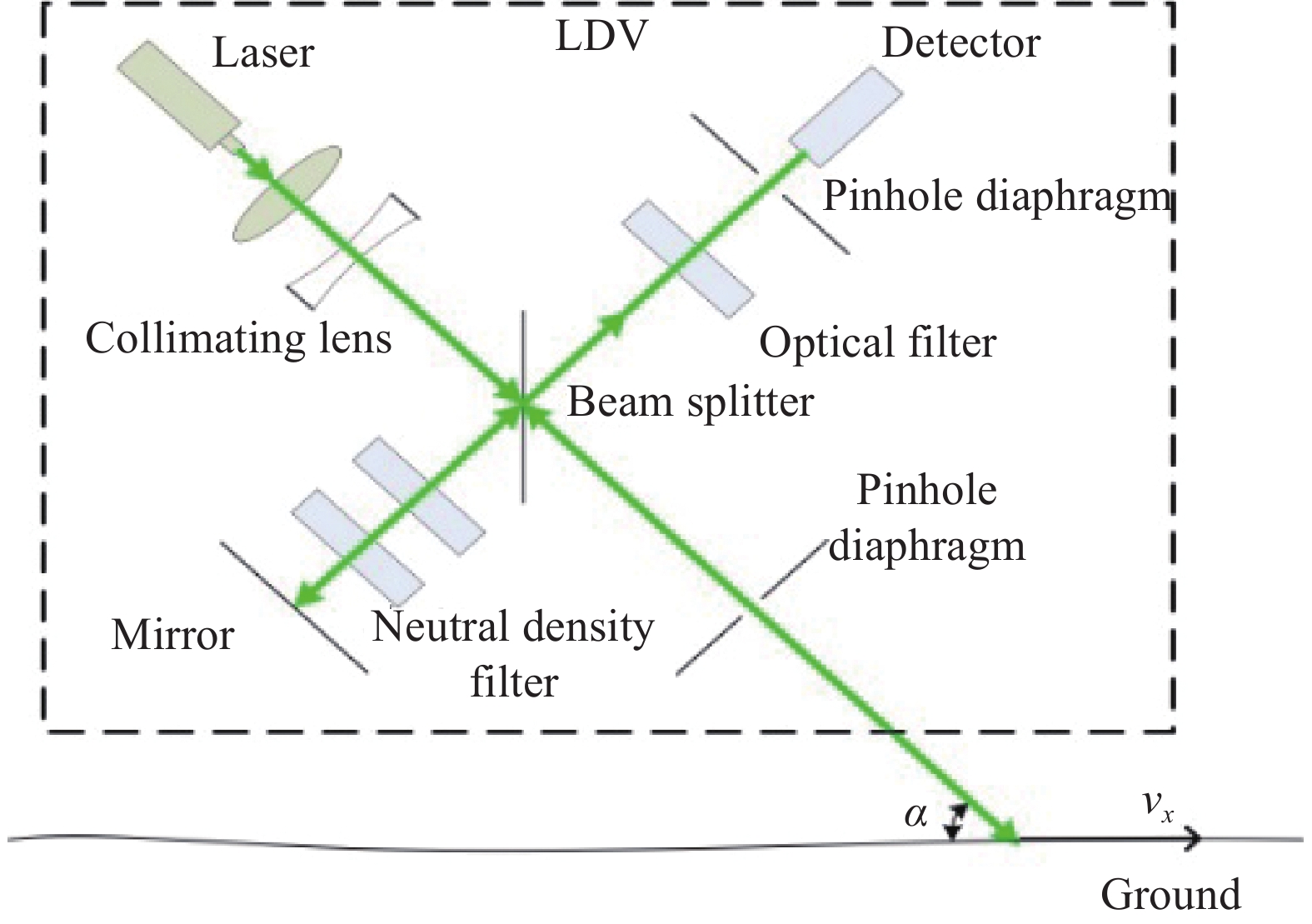
利用参考光结构LDV对液体以及气体的速度进行测量时,通常采用前向散射接收系统,但是,在车载测速应用中,散射体为固体等非透明物体,前向散射接收系统显然是不适合的,故通常采用如图5所示的后向散射单光束结构来进行速度测量,其多普勒频率和相应的速度表达分别为式(3)和(4) [2]:
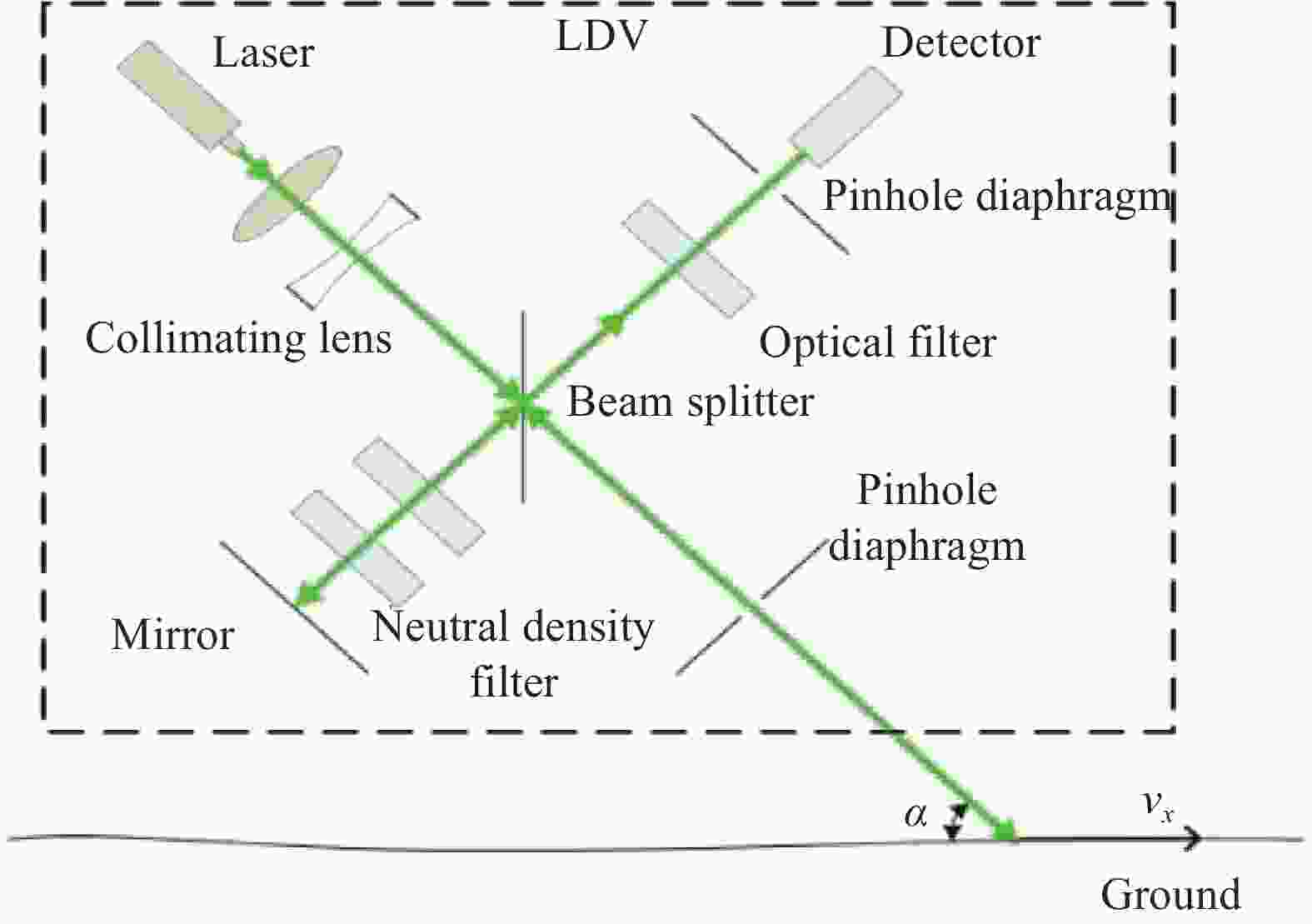
Figure 5. Structure diagram of single-beam LDV for ground vehicle
式中:vx为相应的车辆沿前进方向上的速度分量;α为测量光束与地面的夹角。
参考光结构LDV的优势在于其测量距离不受接收系统中透镜焦距的限制,可以进行离焦测量,在测量景深内都可以接收到较高质量的散射信号,解决了信号丢失的问题,可以更好地适应车载应用中路面起伏的问题,使得参考光结构LDV比双光束LDV更适合车载应用。
参考光结构LDV参与外差干涉的是发生多普勒频移的散射光与未发生多普勒频移的参考光,其外差效率取决于这两束光的准直程度,为了实现光束的严格重合,对光学器件的调整也提出了更高的要求。
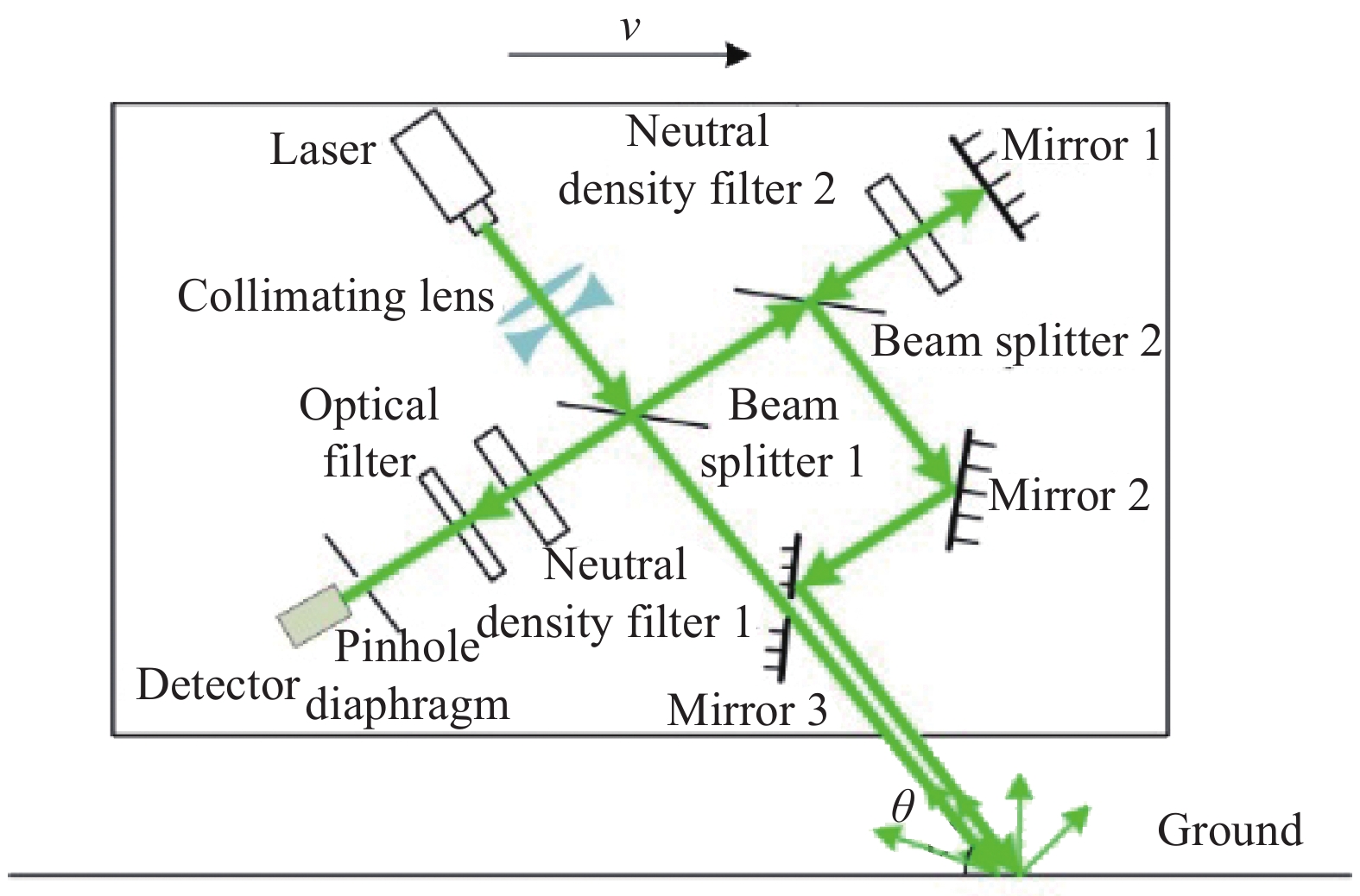
研究人员为了提高参考光结构LDV的光能利用率,提出了分光再利用结构[9]。在通常的参考光光路结构中,由于要与散射得到的较弱信号光光强相匹配,参考光的大部分能量都被衰减片衰减掉了,如图5所示。分光再利用结构在参考光的分路上增加了一个分束镜2将部分光能反射,这部分能量最后通过全反镜3入射到待测表面,从而提高光能利用率,如图6所示。分光再利用结构拥有更高的信噪比,是传统参考光结构LDV的(1+r)倍,其中r为分光镜2的反射率,更适用于车载测速应用。
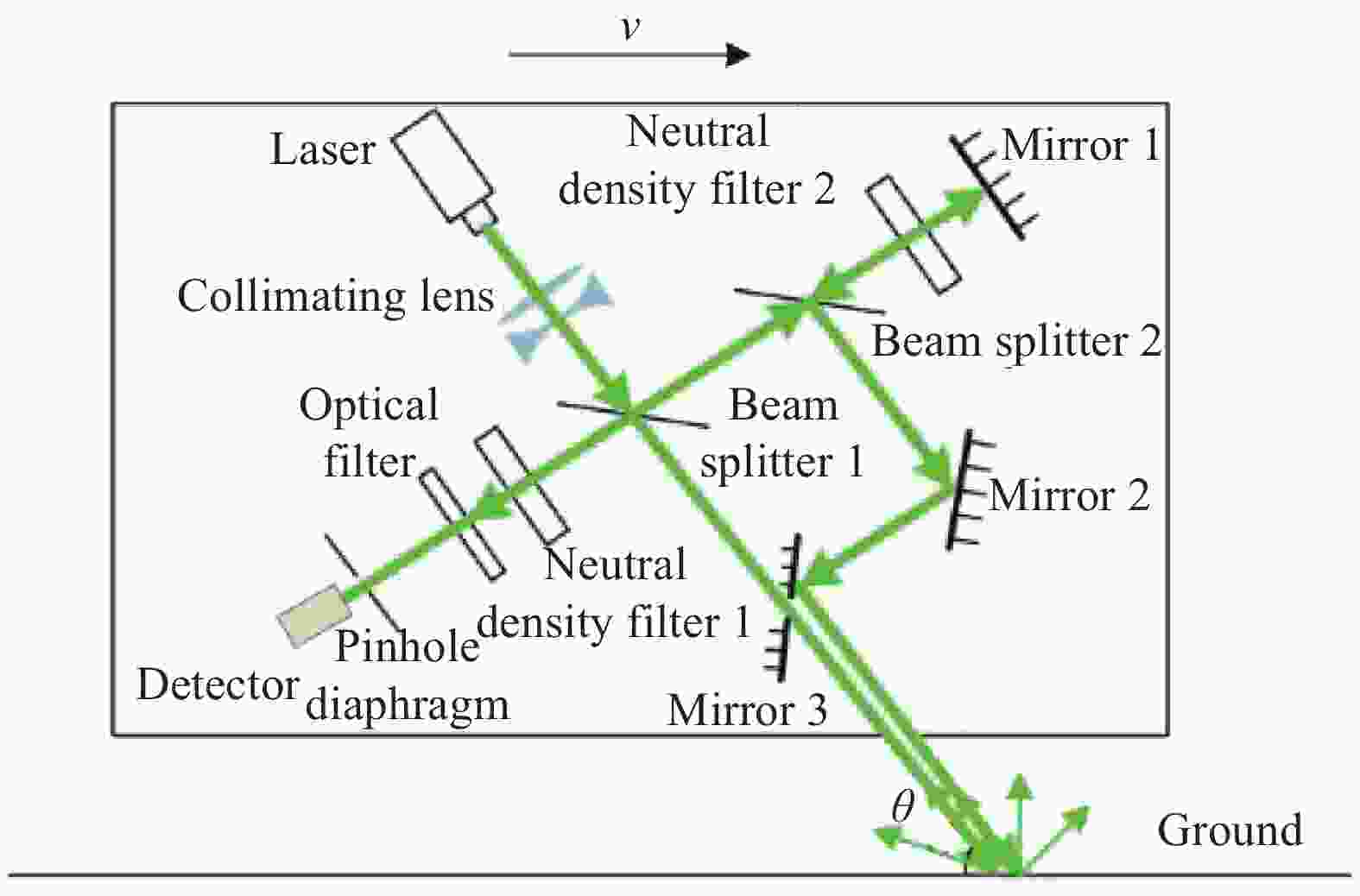
Figure 6. Structure diagram of spectral reuse type LDV
-
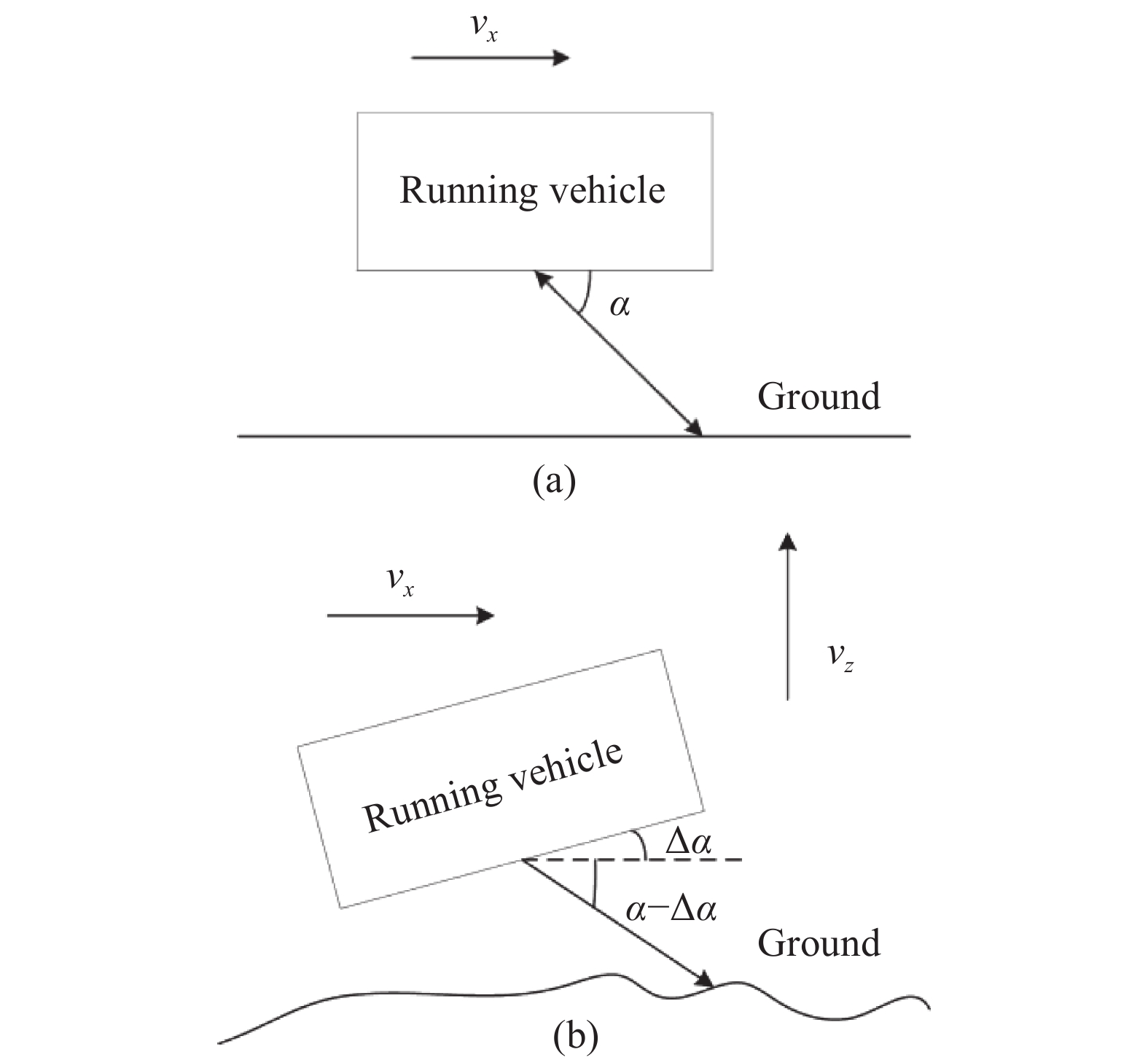
单光束LDV在安装到车式载体上时,测量光在水平方向上的投影通常与车头的前进方向是共线的,测量的是车辆前进方向上的速度分量,如图7所示,在行驶至凹凸不平的路面时,LDV的发射倾角会发生变化,同时车辆会有竖直方向上的速度分量,这都会对前进方向上的速度分量测量产生串扰,导致测量误差。
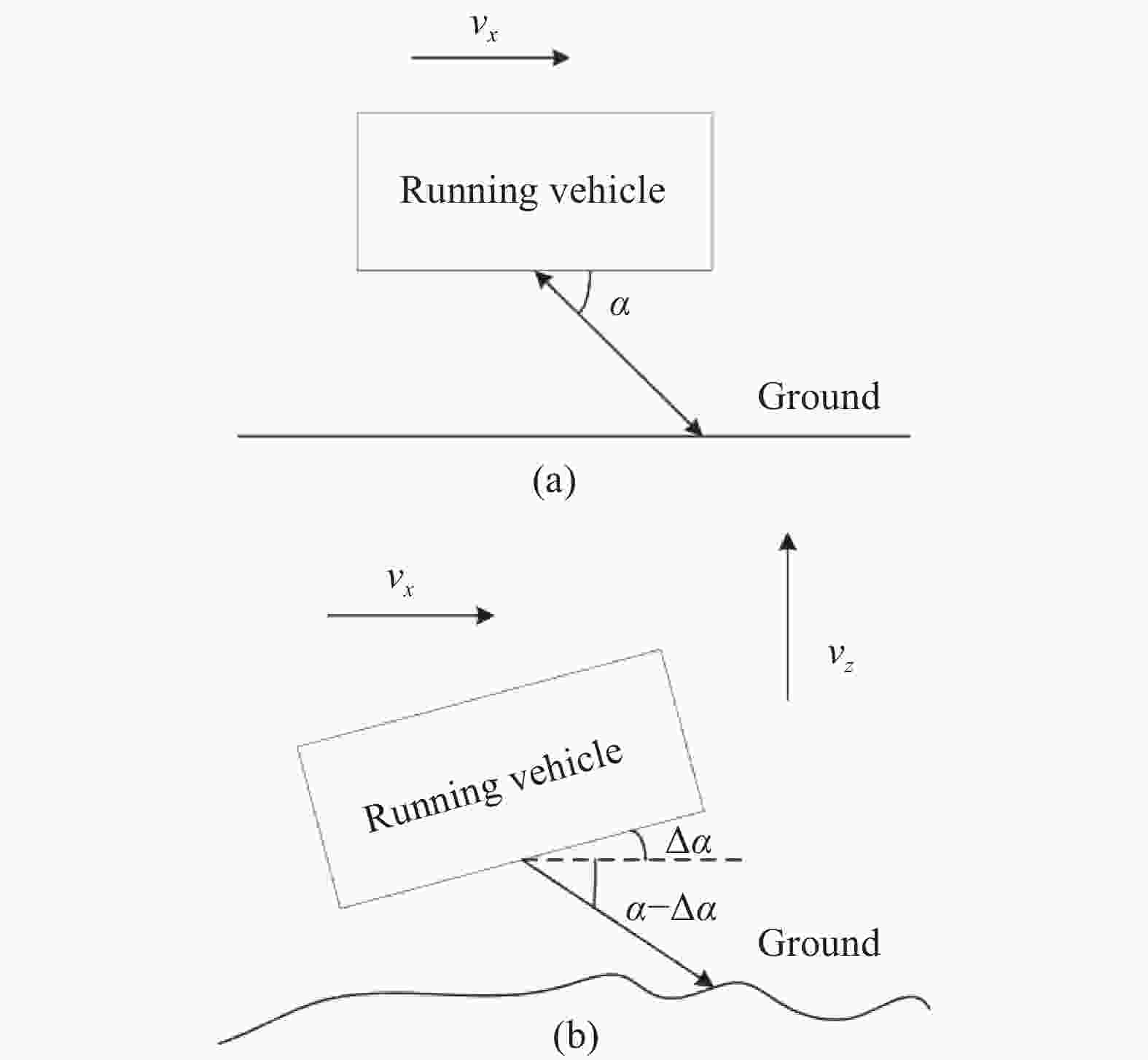
Figure 7. (a) Schematic diagram of the emission angle of LDV when the vehicle is on a flat road; (b) Schematic diagram of the emission angle of LDV when the vehicle is on a rough road
式中:α为理想情况下测量光束的发射倾角;Δα为发射倾角的变化量;vz为载体在竖直方向上的速度分量。
为了提高单光束LDV的测速精度,研究人员提出了Janus配置结构的单光束LDV来减小车辆上下起伏颠簸带来的影响[10]。如图8所示, Janus配置结构的LDV由两套完全相同的单光束LDV组成,以相同的发射倾角分别朝向车头和车尾的方向,工作时,两套LDV同时独立进行测速。如图9所示,当进入到凹凸不平路面时,车辆颠簸起伏的影响逐渐显著。
公式(6)和(7)分别表示两套单光束LDV的多普勒频率$ {f'_{D1}} $和$ {f'_{D2}} $。
Janus匹配的单光束LDV速度测量的相对误差为:
假设${v_x} = 10 \;{\rm{m/s}}$,$\alpha = {30^ \circ }$, $\Delta \alpha = {5^ \circ }$,${v_z} = 0.1 \;{\rm{m/s}}$,根据公式(5)和(8)可得单光束LDV和Janus配置结构LDV速度测量的相对误差分别为4%和0.08%。相较单独的单光束LDV进行速度测量,Janus配置的测速系统大大减小了地面不平整、车辆颠簸对测量精度的影响。
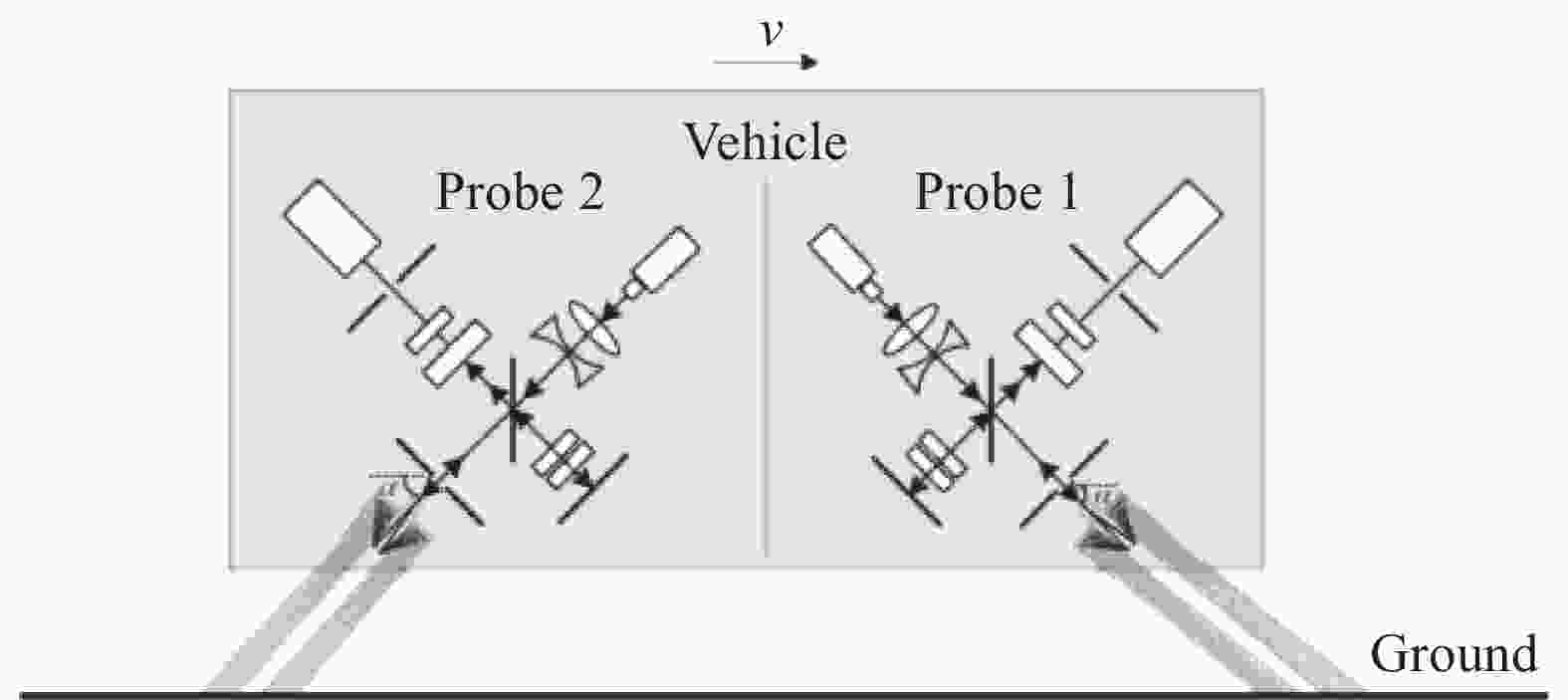
Figure 8. Structure of Janus configuration single-beam LDV

Figure 9. Schematic diagram of the emission angle variation of the Janus configuration LDV when the vehicle is on a rough road
-
前文介绍的LDV获取的都是一维速度信息,也就是在行进方向的速度分量信息,而车辆在运动中的速度矢量是由三个方向上的分量合成得到的,只有对三个分量进行测量,才能对速度信息进行完整的描述。车载LDV也经历了从一维测量到二维、三维测量的发展历程。
-
二维LDV在一维LDV测量车辆前进后退的速度的基础上增加了竖直速度分量测量的维度,可以敏感车辆上下颠簸带来的速度变化,二维激光多普勒测速仪由两个一维LDV子系统组成,其中的子系统可以采用双光束结构,也可以使用单光束结构,但考虑到车载应用实际,通常选用可以实现较大测量景深的单光束结构作为多维LDV中的子系统。
图10所示为二维LDV的典型结构图,测量光束在水平面上的投影与车辆的前进方向平行。
假设两个子系统分别测到的速度为v1和v2,θ1和θ2为两个子系统的安装夹角。根据图中的几何关系,可以将两个子系统测到的速度用前进和竖直方向的速度分量进行表示,根据公式(9)~(11)即可反推出vx和vz。
由于二维LDV增加了竖直方向这一测量维度,可以较好地反映车辆实际行驶中路面颠簸的情况,相较于单光束LDV提供的一维速度信息有更高的测量精度,更有利于后续在导航定位中的应用。

Figure 10. Structure diagram of two-dimension (2D) LDV[11]
-
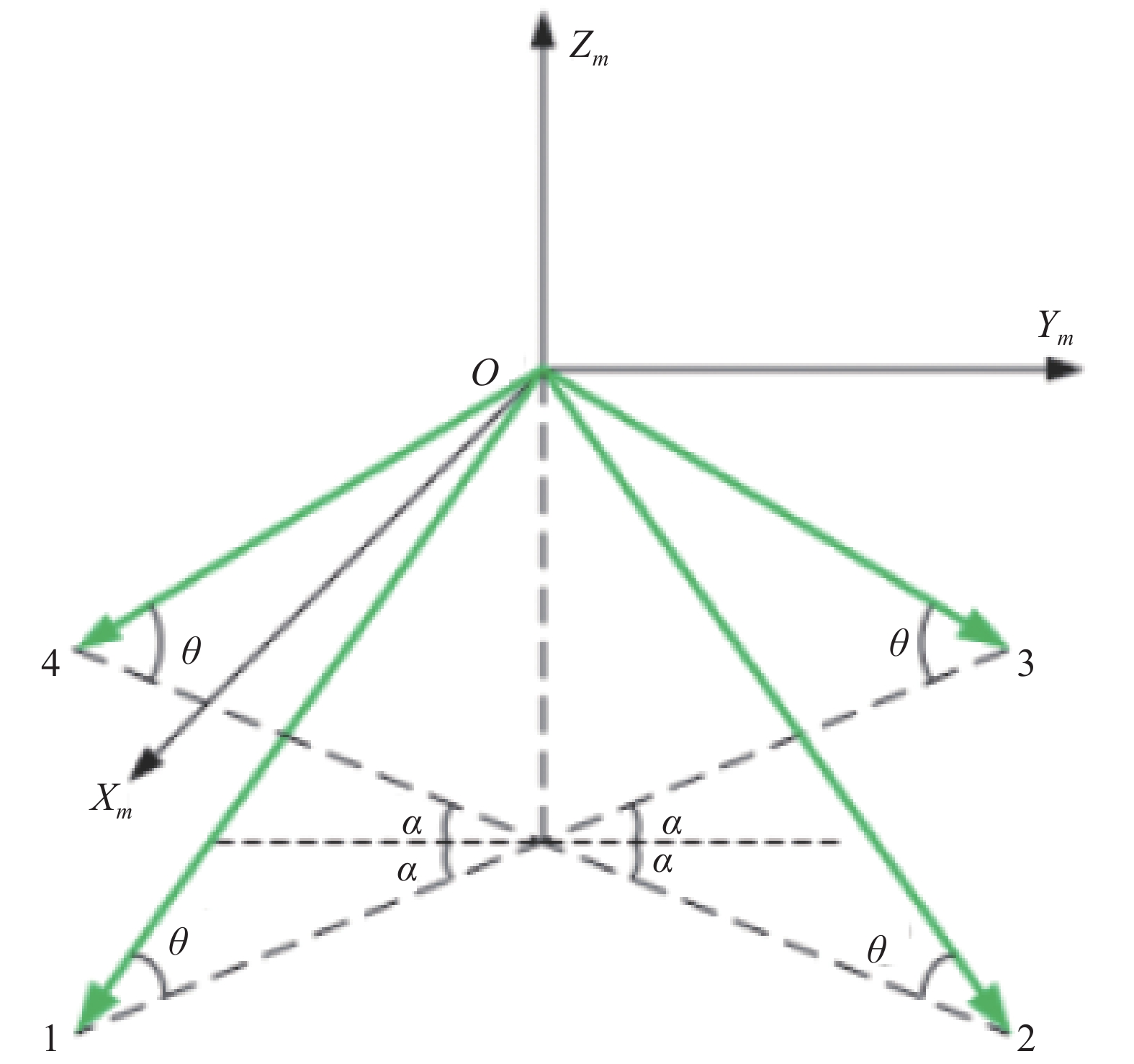
与二维LDV类似,三维LDV也是由一维单光束子系统组成,要解算三个方向上的速度分量,在空间中至少要有三个不共面的向量基,也就是说至少需要三个一维单光束子系统,基于测量冗余考虑,三维LDV通常采用四个单光束子系统,四光束的安装角度和发射倾角如图11所示。
各个子系统输出的速度分别为[4]:
式中:fD1 、fD2、 fD3、 fD4分别为四个单光束子系统测到的多普勒频率。光束倾角均为θ,光束投影与Ym轴夹角均为α,在安装角度已知的情况下即可解得车辆三个方向上的速度分量。
可以看到,采用冗余方案的三维LDV在其中一个子系统无法正常工作时,还可以对三维速度进行测量,整体系统有较高的鲁棒性。
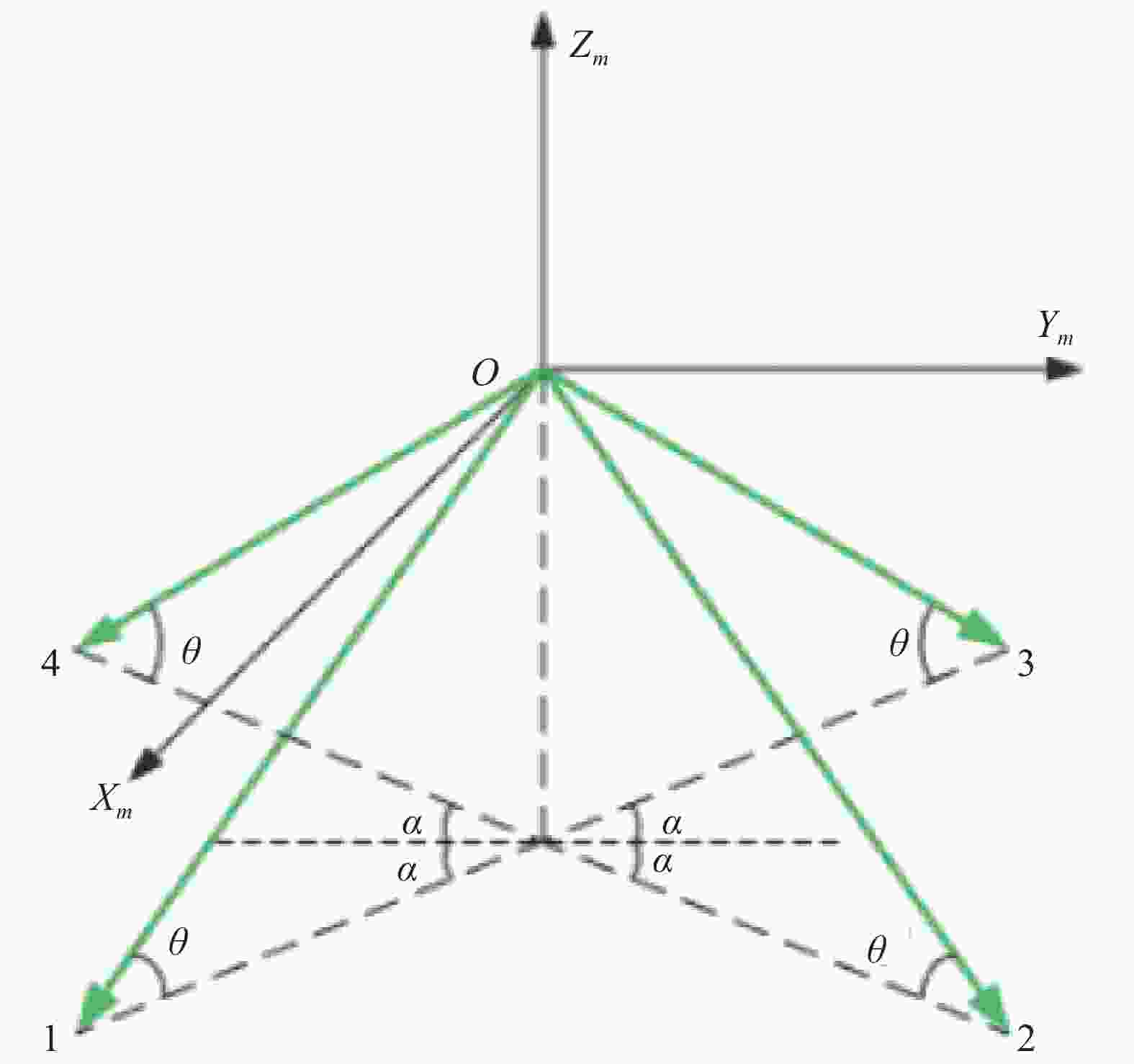
Figure 11. Structure diagram of the three-dimension (3D) LDV beams[12]
-
为了提升LDV的实用性,使其能够应对载体运行的复杂环境,为载体提供高精度速度信息,研究人员针对测速仪的众多关键技术进行了深入研究。
对LDV的测速误差、比例因子等参数进行有效标定,是衡量测速仪性能的基础技术之一。最常见的标定方法是在实验室条件下采用转盘或转鼓对测速仪进行标定,这种方法被美国、德国、日本等多个国家的计量院所采用[13-17]。国内张小跃等[18]于2012年提出了一种基于转台的单波束激光测速仪标定方法,通过依靠具有稳定速率的转台,对单波束激光测速仪的比例因子及安装角进行标定。黄荣等于2018年提出了一种激光多普勒测速仪高精度标定系统,对标定系统的主要不确定度进行了详细的讨论分析,并利用该系统对测速精度为0.1%的LDV进行了检定[19]。以上基于转台的标定方法具有标定精度高的优点,但其无法进行实时标定。为了弥补实验室标定方法的不足,研究人员提出了LDV的在线标定技术,利用卫星导航、SINS等手段提供速度信息,通过Kalman滤波等方法对LDV的比例因子、安装误差角等参数进行在线标定[11,20-23],提升了测速仪标定导航过程的实时性,满足运动载体的机动性要求。
多普勒信号的质量直接决定了测速仪的测速精度,研究人员用激光多普勒信号的品质因子Q来量化表示多普勒测速仪的信号质量,其定义为频谱上多普勒频率峰值强度值与频谱噪声基底强度的比值。席崇宾等提出了基于液体透镜的品质因子增强技术[24]。通过控制液体透镜的驱动电流改变测速仪出射光束的腰斑位置,使多普勒信号的品质因子显著增加,扩大了激光多普勒测速仪的工作距离和可测量范围,可测量范围为700~3300 mm。此外,研究人员还提出了一种噪声自校正激光多普勒测速系统,在激光多普勒测速仪的出射光路上增加斩波器,对基底噪声和多普勒信号进行循环测量。通过将基底噪声的信息实时反馈给信号处理系统,实现噪声自校正,有利于多普勒信号质量判定及多普勒频率识别。
除了多普勒信号质量以外,载体运动过程中的颠簸抖动也会导致LDV的测速精度降低,这是因为载体的颠簸抖动使测速仪的比例因子发生了改变。虽然2.1.4节中提到的Janus配置的单光束LDV可以减小车辆上下起伏颠簸的影响,但由于需要采用两套完全相同的单光束LDV致使系统结构复杂。聂晓明和周健提出了一种新型测速仪结构[25],这种结构的LDV发射两束具有一定夹角的出射光束,根据两个多普勒频率和光束之间的夹角计算载体的运动速度。这种方法能够使LDV的输出不受载体俯仰角变化的影响,且相对于Janus配置的LDV,结构更为简单。
在流体、固体、风场等的速度测量中,除了要求测量速度大小外,还要求辨别速度方向。M. K. Mazumder利用旋转衍射光栅或布拉格光栅对LDV的两束出射光进行移频[26],使被测速度与多普勒频率之间的关系不再为偶函数,从而实现速度方向的辨别。类似的,Koichi MAru和Kento Watanabe利用LiBbO3晶体的电光效应对LDV的出射光束进行移频,从而实现辨向功能[27]。但这两种方法存在频移量低、需要高电压高频电源驱动等缺点。黄荣等对原有LDV光路进行改进,通过对两路多普勒信号的相位进行辨别来实现辨向,这种方法原理简单,弥补了传统辨向技术的不足,有利于LDV的集成化、小型化发展,更有利于载体运动速度的测量。
-
基于LDV提供的高精度速度信息,研究人员逐渐将其应用于载体的导航定位。虽然国外对LDV的研究起步较早,但至今鲜见将LDV应用于导航定位的报道;国内对车载LDV以及其在车载组合导航中的应用已有大量的研究成果。国防科技大学周健课题组采用532 nm单纵模固体激光器作为光源,先后对双光束、单光束LDV进行了系统研究和样机研制,后续成功研制出了适用于车载应用的一维、二维和三维LDV[2-4];北京航空航天大学马宗峰课题组采用全光纤化的技术路线对单光束LDV进行了研制,测量光源波长采用了位于人眼安全波段的1550 nm激光[28]。
2011年,有研究人员通过理论仿真预测,若使用LDV/SINS的组合导航方案,当LDV的速度测量精度为0.1%时,组合导航系统的定位精度将提高两个数量级,速度精度将提高一个数量级[29]。基于对车载LDV的成功研制,研究人员开始将LDV实际应用到车辆定位的组合导航中,LDV与SINS组成组合导航系统的典型结构如图12所示,LDV与SINS与车辆固接,以一定的工作频率输出载体的速度、姿态、位置信息,一般的,组合导航系统中,经过如Kalman算法等优化滤波算法处理,LDV提供的高精度速度信息用于修正SINS输出数据,提高导航定位的精度。表1总结了目前利用LDV与SINS结合进行车载组合导航的研究现状。
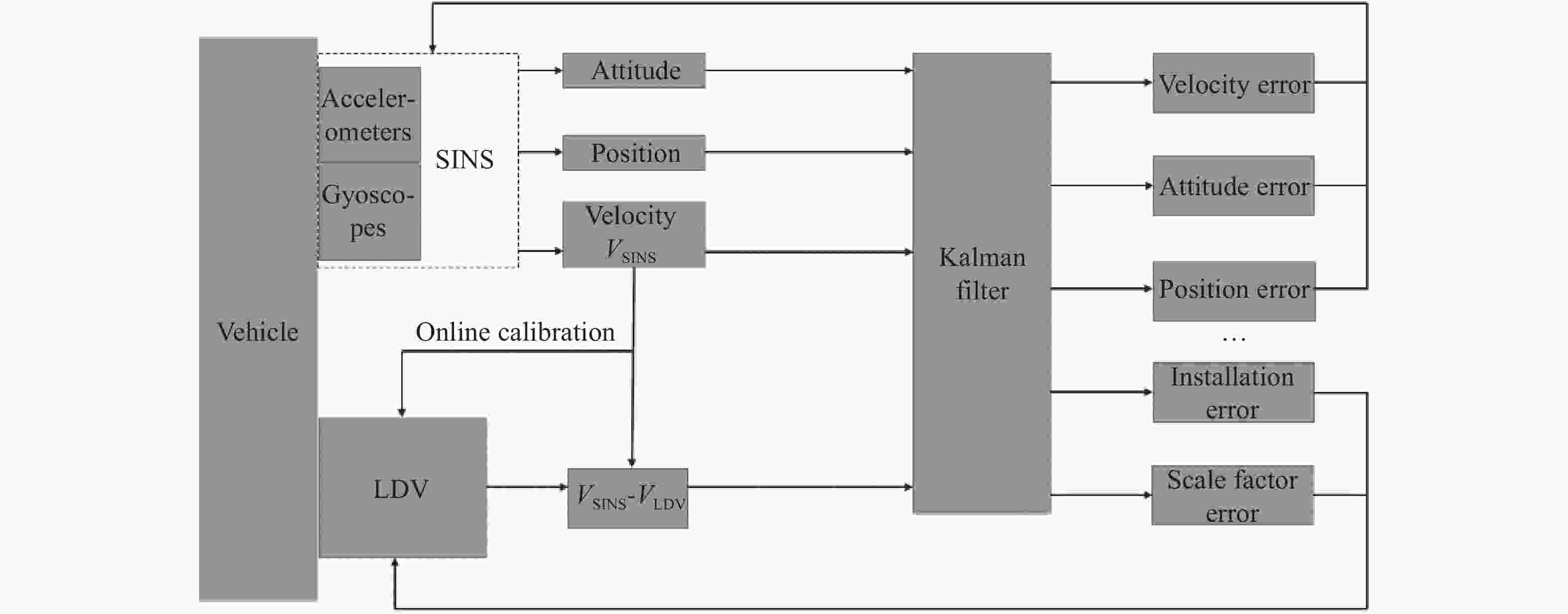
Figure 12. Principle diagram of LDV/SINS integrated navigation system
Institution Year Experimental
distance/kmExperimental
duration/hEast
error/mNorth
error/mSINS-only
error/mIntegrated
navigation
error/mDK
precisionLDV type National University of Defense Technology 2014[30] - 2 - - 1166 20 - Reuse type 2015[31] - 1 - - 1130 8 - Single-beam 2017[22] - 1.25 18 13 22.2 - Single-beam 2017[32] - 2 - - 1180 6 - Reuse type 2017[33] 32 1 25 18 1300 30.8 0.09% 1D 30 2 3 8 1180 8.5 0.02% 2D 2017[34] - 1.2 - - 2 000 6 - Reuse type 2018[35] 55.6 2.1 - - 1020 5.8 0.01% Janus configuration 2018[36] 29.67 2.2 - - 936 17.2 0.06% Reuse type/one-dimension 29.67 2.2 - - 7.1 0.02% 2D 2018[11] 55.6 - - - 236 5.5 0.01% 2D 2018[21] 37.6 1.9 - - 829 2.6 0.007% 2D 2018[12] 46.4 2.2 - - 1053 2.9 0.006% 3D 2019[37] 55.4 2.1 - - 253 22 0.04% Single-beam 55. 4 2.1 - - 5.2 0.009% Janus configuration 2020[38] 17.2 0.65 6.7 10.7 - 10.8 0.06% Single-beam 2020[23] 25.5 0.85 - - - 26.6 0.1% Single-beam 2021[39] 154 3.7 - - - 15.2 0.009% Single-beam 2022[40] 47.3 1.5 - - 1158 8.3 0.02% Reuse type Beihang University 2014[41] - 0.6 190 70 - 202.4 - Fiber single-beam 2015[42] - 0.6 115 125 - 169.8 - 2016[43] 105 1 45 61 - 72.4 0.07% Northwestern Polytechnical University 2018[44] 230 4.15 20 15 - 225 0.09% Dual-beam Xi’an Research Institute of High Technology 2019[45] 56.6 1.81 5 4 - 6.4 0.01% Dual-beam Table 1. Review of researches of LDV/SINS vehicle integrated navigation
表中对目前各种类型LDV进行组合导航时航迹推算最高精度进行了加粗突出,可见利用LDV进行组合导航的航迹推算(Dead Reckoning, DK)精度已经优于0.01%,达到了高精度导航定位的要求。整体看来,单光束LDV的组合导航精度普遍优于双光束LDV,更适合于车载导航应用,同时随着速度测量维度的增加,导航精度也呈现提高的趋势。近年来,利用里程计与SINS进行组合导航研究的航迹推算的最高精度维持在0.01%左右[46-50],与双光束LDV组合导航的结果相当,低于单光束LDV以及二、三维LDV的组合导航精度,这为推广LDV在车载导航领域的应用提供了有力的数据支撑。
LDV为高精度的车载导航定位赋能,在军用和民用领域发挥了重要作用。但目前组合导航系统的SINS中的惯性测量单元(IMU)主要由加速计和激光陀螺或光纤陀螺组成,这两种姿态传感器件本身具有较高的测量精度,而LDV能否与MEMS加速度计以及陀螺仪组成的精度相对较低的SINS进行组合导航,同时得到高精度的定位结果,在接下来的工作中值得分析和研究,这对于研制低成本、小型化的车载LDV/SINS组合导航模块有着重要的研究意义和价值。
-
随着LDV在车式载体上的成功应用,研究人员看到了其在导航定位中的巨大潜力和应用价值。LDV能否用于高速列车、无人机、水下潜航器等运动载体,日益成为关注的焦点,而应用载体的变化对LDV提出了新的技术要求,需要进行深入的分析与研究。下面对LDV应用载体的拓展进行分析和展望。
-
中国高铁的目前运行时速可以达到400 km/h。真空管道超高速磁悬浮列车理论速度可达1000~4000 km/h,目前中国、美国、荷兰等国家已开展相关技术研究。支撑高速列车系统运行的众多关键技术中,速度位置服务已显示出其重要性。
目前使用的列车测速方法中按照参考位置的不同分为相对测速定位技术、绝对测速定位技术[51-53]。但它们存在着或测速精度低、或不适于大规模使用的问题,而卫星测速定位方法容易受到外界干扰,关键时刻不能保证完全可靠[54],因此急需一种高精度、高实时性、测速范围覆盖全速度域、在强电磁环境下可靠运行的测速定位系统用于高速列车交通系统。
激光多普勒测速仪所具备的非接触测量,测量精度高,动态响应速度快,抗干扰能力强、测速范围大以及可测量多维矢量速度等特点,使其与高速列车交通系统的测速需求非常契合。国外用于高速测量的激光多普勒测速仪如表2所示。
Table 2. Existing LDV for high-speed measurement
虽然已有的激光多普勒测速仪已经可以进行数马赫的速度测量,但其均采用双光束差动结构,这种结构只能对探测体内的运动表面速度进行测量,无法进行离焦测量。车辆行驶过程中的颠簸将导致信号丢失,因此这种结构不适用于车辆载体的运动速度测量。而根据第2节中的介绍,单光束LDV的信号接收不受透镜焦距的限制,可以进行离焦测量,更适用于车辆载体的速度测量。目前车载LDV的测速上限为250 km/h,无法满足高速列车的测速要求。因此,对参考光束型激光多普勒测速仪的测速范围进行扩展,使其拥有足够的测速上限和测速范围,具有重要的学术意义和应用价值。
-
光波频段在海水中的低损耗窗口为460~580 nm[60-61],该范围的蓝绿光在海水中的衰减系数较小、穿透能力较强,可以利用走航式LDV对惯导系统进行水下速度校正[62-64]。相比于声学多普勒计程仪,激光多普勒测速仪具有衰减系数大、发散角小、光速快和隐蔽性强的优点。此外,LDV所具备的数据更新速率高、比例因子稳定、线性度好、动态响应快等优点使得其在水下导航定位应用中有着巨大的应用潜力,值得深入研究。
-
航空母舰作为一支强大现代海军的标志性舰艇,在我国建设海洋强国以及海军“走向深蓝”的征途中有着不可或缺的地位。海上环境复杂多变,舰载机以及飞行员的飞航安全是航母战斗力的基石,舰载机与舰体之间相对速度的精确测量对于舰载机起降成功至关重要,因此研究更高精度以及实时性好的独立测速手段显得尤为重要;另外,在深空探测领域,航天器需要在行星表面进行着陆,下降过程中持续获取其与天体表面之间的相对速度,对于保障任务顺利完成不可或缺。在前文所述的应用场景中对远距离测速手段的需求迫在眉睫。LDV作为一种具备高精度、高可靠性的独立测速手段,很好地契合了应用需求。
2017年,有研究人员对LDV在飞行器导航中的应用进行了理论分析[65],不同于车辆在二维平面上运动,飞行器在三维空间中进行机动,其轨迹有着更大的复杂度和变化率,所以传统的车载LDV并不适用在该场景下,提出四波束配置的机载LDV用于飞行器的导航。而LDV成功用于飞行器的关键在于远距离条件下实现稳定高信号质量的测速,当前的激光多普勒测速仪的工作距离较短,通常局限在10 m以内,而飞行器的飞行高度通常在几十米到几百米,甚至上千米,这就对LDV的工作距离提出了更高的要求。2022年,国防科技大学的研究人员通过对LDV的出射光学系统进行建模分析和仿真计算,设计了聚焦式的测量光束发射装置,成功将LDV的工作距离拓展至50 m,在测量中保持了较高的信号质量和稳定性,这种LDV基本满足应用在无人机等低空飞行载体上的条件,在机载LDV的研制上做出了有益的探索[66]。
-
文中对用于运动载体导航定位的LDV研究现状进行了系统总结,其中对LDV的分类以及在车载导航中的应用现状进行了详细介绍。可以看到,单光束LDV比双光束LDV更适合车载应用,测量速度维度越高的LDV对导航精度提高的效果更明显。通过与惯性器件相组合,LDV较好地提高了车式载体的定位精度,具有极高的应用价值,对于民生重要工程保障以及部队战斗力提升都有极为重要的意义。但现有的研究中,惯性器件通常为成本较高的激光陀螺、光纤陀螺,在保证精度的前提下,更低成本的SINS/LDV组合导航模块是下一步值得研究的方向。同时,随着应用场景的拓展,也对LDV的性能提出了更多的要求,需要对现有的LDV进行改进和优化,以满足如高速测量、水下测量、机载测量等更为复杂的应用需求。可以预见,随着研究的持续深入,用于运动载体导航定位的LDV会变得更为全面和完善,成为覆盖高低速测量、海陆空全领域的高精度独立测速装置,在解决实际科学和工程问题中发挥更大、更重要的作用。
Review of laser Doppler velocimeter technology for navigation and localization
doi: 10.3788/IRLA20230143
- Received Date: 2023-03-15
- Rev Recd Date: 2023-05-29
- Publish Date: 2023-06-25
Fund Project:
Natural Science Foundation of Hunan Province, China (2021JJ30782)
-
Key words:
- optical measurement /
- laser Doppler velocimeter /
- navigation and localization /
- moving vehicles
Abstract:







 DownLoad:
DownLoad: