Zhang Xinyu, Jiang Lili, Song Ran, Zhang Zhijun, Li Bingbing, Su Juan, Wu Qi. Application of 632 nm FMCW lidar for simultaneous velocity and distance measurement in humid environment[J]. Infrared and Laser Engineering, 2024, 53(3): 20240093. doi: 10.3788/IRLA20240093
| Citation:
|
Zhang Xinyu, Jiang Lili, Song Ran, Zhang Zhijun, Li Bingbing, Su Juan, Wu Qi. Application of 632 nm FMCW lidar for simultaneous velocity and distance measurement in humid environment[J]. Infrared and Laser Engineering, 2024, 53(3): 20240093. doi: 10.3788/IRLA20240093
|
Application of 632 nm FMCW lidar for simultaneous velocity and distance measurement in humid environment
- 1.
Institute of Marine Science and Technology, Shandong University, Qingdao 266237, China
- 2.
Southern Marine Science and Engineering Guangdong Laboratory (Guangzhou), Guangzhou 511458, China
Funds:
Southern Marine Science and Engineering Guangdong Laboratory (Guangzhou) Foundation (GML2021GD0808)
- Received Date: 2024-02-05
- Rev Recd Date:
2024-02-26
- Publish Date:
2024-03-21
-
Abstract
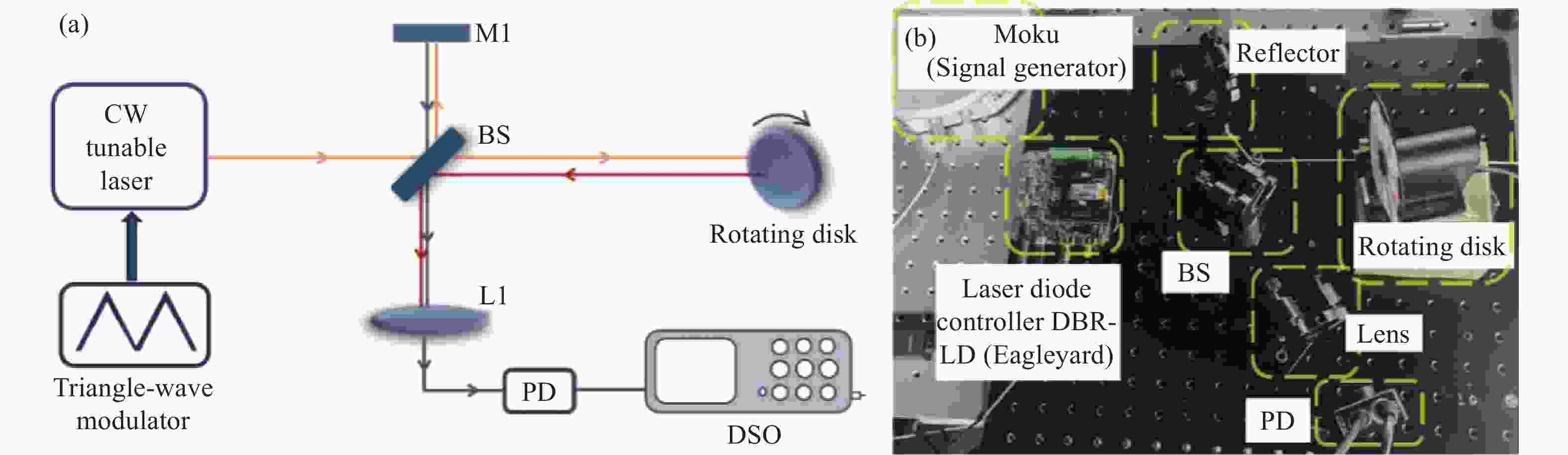
Objective In high sea conditions and complex environments, for achieving safe landing of unmanned aerial vehicles (UAV) on unmanned surface vehicles (USV), it is necessary to accurately measure the distance and speed simultaneously between them and provide real-time feedback to the control system. However, commonly used GPS navigation and vision-based navigation approaches often suffer from insufficient dynamic positioning. These technologies could only measure distance but not the relative speed between UAV and USV. Frequency modulated continuous wave (FMCW) lidar, which could simultaneously measure both velocity and distance, has great potential for application in autonomous landing between UAV and USV during high sea conditions.For different applications, FMCW lidar could utilize different frequency modulation schemes on the optical carrier. Commonly used frequency modulation scheme includes the triangular, the sawtooth, and the sinusoidal waveforms. It is an economical and convenient approach to measure velocity and distance simultaneously using a triangular waveform modulated FMCW lidar. Considering eye safety, FMCW lidar normally deploys lasers with wavelengths longer than 1550 nm. However, the light absorption in the moisture above air/sea surface is too large for the infrared wavelength range. Methods In this paper, the lidar system employing a 632 nm distributed Bragg reflector (DBR) semiconductor laser which operating the water vapor transmission wavelength band and an FMCW technology was proposed and experimentally demonstrated. The symmetric triangular waveform modulation was achieved by directly modulating the laser injection current. The schematic diagram of the system is shown in Fig.1(a), and the experimental setup of the system is shown in Fig.1(b). The modulated laser output, with continuous frequency tuning, was further divided into two beams by a beam splitter (BS). Of which, one beam is used as the reference light, and another beam is used as the detection beam and incident on the measurement target. The detection light, which is reflected (or scattered) by the target, is collected and mixed with the reference light by a photo-detector (PD) for coherent heterodyne detection. The beating signal that carries information about the distance and velocity of the target is recorded by a digital storage oscilloscope (DSO). By performing operations such as fast Fourier transform (FFT), the beat frequencies of the up-sweep and down-sweep bands could be obtained, and then the distance and velocity information of the target could be calculated. The experimental results show that the modulation bandwidth of the system is 12.5 GHz without mode hopping using the internal modulation scheme of direct current injection, and the modulation period is 5 kHz(0.2 ms). Results and Discussions The measurement accuracy of distance of this FMCW system was tested by moving the target with 5 cm a step, ranging from 10 cm to 130 cm. The measured distances of the target were compared to the reference distances, as shown in Fig.2(a). The results demonstrate a strong correlation between the measured distance and the reference distances, with a linear fitting curve slope of 1.00121, R-squared value of 1, and a maximum relative standard deviation (RSD) of 0.3. The RSD is defined by the following formula, where S is the standard deviation (also denoted as SD) and $ \bar{x} $ is the mean value. $RSD=\dfrac{S}{\bar{x}}\times 100\mathrm{\%}=\dfrac{\sqrt{{\displaystyle\sum_{i=1}^{n}{\left({x}_{i}-\bar{x}\right)}^{2}}/({n-1})}}{\bar{x}}\times 100\mathrm{\%} $ Further reducing the step size for movement to test distance resolution, experimental verification showed that the system's distance resolution is 1.5 cm. The accuracy of velocity measurement of the FMCW system was verified by measuring the linear speed of a scattering point on the standard rotating disc with high-precision control of the rotational frequency. A comparative experiment was conducted with a continuous wave (CW) system using the same laser operated under continuous wave. The results of the speed measurement are shown in Fig. 2(b). The linear fitting results show that within the velocity range of 10 cm/s to 125 cm/s, the FMCW system has a linear fitting curve slop of 0.99991 and an R-squared value of 0.99999 when compared to the reference velocity. The measurement resolution is 0.5 cm/s with RSD of 0.6%. On the other hand, The CW system has a fitting curve slope of 1.00214, an R-squared value of 0.99999, and a RSD of 1.2%, which is higher than that of the FMCW system. The experimental verification demonstrates that the FMCW system not only achieves synchronous measurement of target velocity and distance, but also provides a higher speed measurement accuracy than the continuous wave (CW) laser speed measurement system. Conclusions When UAV is performing precise landing on USV in high sea conditions, it is important to measure both the velocity and distance between them simultaneously. In response to this requirement, this paper proposed and experimentally demonstrated a lidar system based on the 632 nm laser which was frequency-modulated by continuous wave (FMCW) for simultaneous measurement of both velocity and distance. The 632 nm semiconductor laser was modulated by a directly injected triangular-wave current. The modulated light was incident on the moving target. The beat frequency signal generated by the interference of the scattered light from the target and the reference light was demodulated to extract information about the velocity and distance. The experimental results show that the FMCW lidar system has a measured distance range of 10 cm to 130 cm, with a resolution of 1.5 cm and a relative standard deviation (RSD) of 1.5%. The measured speed range was from 10 cm/s to 125 cm/s, with a resolution of 0.5 cm/s and a relative standard deviation (RSD) of 0.6%.
-
References
|
[1]
|
Yang T, Li G, Li J, et al. A ground-based near infrared camera array system for UAV auto-landing in GPS-denied environment[J]. Sensors , 2016, 16(9): 1393-1412. |
|
[2]
|
Stann B L, Ruff W C, Sztankay Z G. Intensity-modulated diode laser radar using frequency-modulation/continuous-wave ranging techniques[J]. Optical Engineering , 1996, 35(11): 3270-3278. |
|
[3]
|
Dong Y, Zhu Z, Tian X, et al. Frequency-modulated continuous-wave LIDAR and 3D imaging by using linear frequency modulation based on injection locking[J]. Journal of Lightwave Technology , 2021, 39(8): 2275 - 2280. |
-
-
Proportional views

-









 DownLoad:
DownLoad: